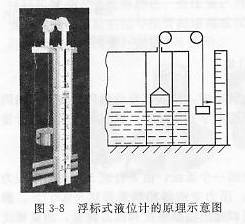
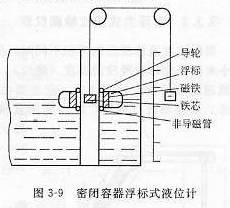
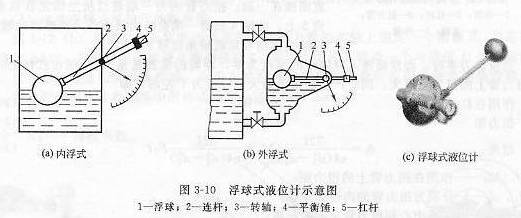
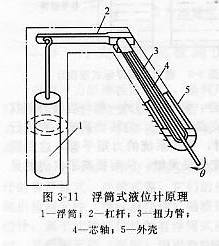
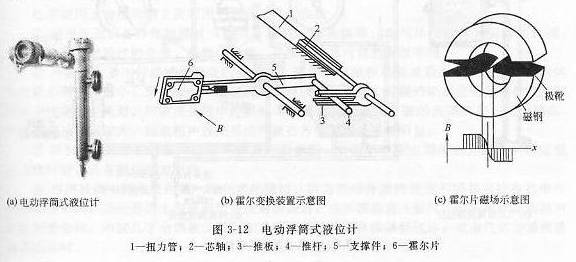
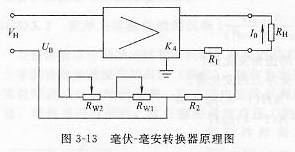
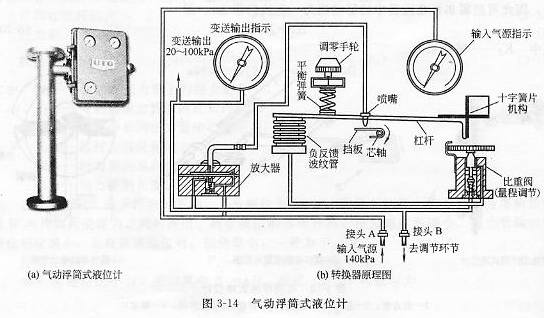
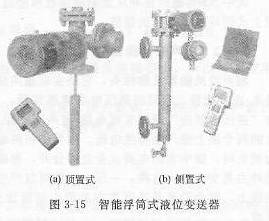
恒浮力式液位检测仪表 1.浮标式液位计 图3-8为浮标式液位计的原理示意图,浮标为一空心的金属或非金属的盒子,将浮标用绳索连接并悬挂在定滑轮上,绳索的另一端挂有平衡重物。当液位不变是,浮标的重力与浮标所受液体的浮力之差和平衡重物的重力相平衡时,其平衡关系式为: W-F=G 式中: W--浮标的重力,N; F--浮力,N; G--平衡重物的重力,N; 当液位上升时,浮标所受的浮力F增加,则有W-F<G,原来的力平衡关系被破坏,浮标沿着导轨随液位向上浮动,在浮标向上移动的同时,浮力F将逐渐下降,W-F将逐渐增加,直到W-F重新等于G时,浮标便停留在新的液面位置上;反之亦然,从而实现了浮标对液位的自动跟踪。由于式(3-7)中浮标的重量W和平衡位置的重物的重量G均为常数,因此浮标停留在任意高度的液面上时,浮力值F都不变,故称此法为恒浮力法。 此种测量方法简单,多数用于敞口容器中液位的检测,也可以用于密闭容器中液位的检测,通过磁性连接的方式将浮子随液位变化产生的位移传递出去,其检测系统如图3-9所示。浮标式液位计的缺点是,由于滑轮与轴承之间存在着机械摩擦,悬挂钢丝受热拉长及齿轮间隙等因素,将影响其测量精度。 2.浮球式液位计 对于温度、黏度较高,而压力不太高的密闭容器内的液体介质的液位检测时,一般可采用浮球式液位计,其检测系统如图3-10所示。检测元件浮球1有铜或不锈钢制成,同构连杆2与转轴3相连,转轴3的另一端与容器外侧杠杆5相接,杠杆上加装平衡锤4,从而组成了以转轴3为支点的杠杆、角转动系统,来进行其液位的检测。系统一般要求,在浮球的一般浸入液体时,实现系统的力矩平衡。这是因为因为变化Δh所引起的浮力变化最大,浮球位置变化最灵敏,从而提高了仪表的灵敏度。 当液位升高或降低时,系统的力矩平衡将被破坏,因而浮球也要随之升高或降低,直至达到新的平衡。若在转轴3的外端挂以指针,如图3-10a所示,便可从输出的角位移中知道液位的高低。 浮球式液位计,可将其检测元件浮球直接装在容器内部(内浮球式),如图3-10a所示。当容器直径很小时,可根据联通原理,在容器外侧设置一浮球室与容器相连通(外浮球式),如图3-10b所示。外浮球是结构,其特点是便于维修,但不适用于黏稠或易结晶、易凝固的液体的检测;而内浮球式液位计则不受其影响。 由于浮球式液位计的结构与浮标式液位计的结构相比要复杂,需要用轴、轴套、填料密封等构件组成,这样才能达到既保证密封又能将浮球的位移传递出去,因此在进行安装、检修时应充分考虑摩擦、润滑以及介质对仪表各部件的腐蚀等问题,否则将会给测量造成很大的误差。另外,应特别提出的是,浮球杠杆转动轴等各部件的连接应该做到既牢固又灵活,以免日久天长,发生浮球脱落酿成严重事故。 在使用时应该经常检查并清理浮球表面上的沉淀物或结晶的物质,当无法进行清理时,则需重新调其平衡锤的位置。对腐蚀性介质测量时必须注意检查元件的防腐处理,并定期进行检查,以保证必要的测量精度。 变浮力式液位检测仪表 当物体被液体浸没的体积不同时,所受的浮力也不同,因此,可以根据物体所受浮力的大小来测得物体被浸没的高位(液位),故称为变浮力式液位计。浮筒式液位计正是根据这一原理制成的液位计检测仪表,它主要由变送器和显示仪表两部分组成。液位计因不用轴、轴套、填料等进行密封,故他能测量较高压力的液体介质的液位,最高可达32MPa。检测元件浮筒的长度决定了仪表的量程,一般为300~2000mm。 浮筒式液位计由液位传感器和转换器构成。 液位传感器的检测元件,是一沉浸与液体之中的浮筒,一般使用不锈钢制成的空心长圆柱体,被垂直地悬挂在被测介质之中,测量过程中位移极小,不漂移在液体表面上,故也称为沉筒。浮筒在液体中的浮力是用扭力管的扭力来平衡的。 如图3-11所示,检测元件浮筒1垂直地悬挂在杠杆2的一端,杠杆2的另一端与扭力管3、芯轴4的一端垂直固接在一起。扭力管的另一端通过法兰固定在仪表外壳5上。芯轴4的另一端呈自由状态作为传感器的输出,它的输出信号时机械角位移θ。 当液位为零时,即浮筒浸入液体中的深度为零,浮筒的全部重量W作用在杠杆上,此时扭力管上扭力矩最大,同时产生的扭角最大,一般为7°左右,即 作用在杠杆的力 F0=W 扭力矩 M0=F0l 扭角 式中 M0--作用在扭力管上的扭力矩; d1、d2--分别为扭力管的内径和外径; l--浮筒中心到扭力管中心的距离; F0--杠杆左端受到的力; k--扭力管的横向弹性系数; L--扭力管的长度。 当液面上升,高于浮筒的下端,上升液位为H时,作用在杠杆上的力,变为浮筒的重量W与浮筒所受浮力之间的差值。随着液位的逐渐升高,扭力矩逐渐减小,扭力管输出的扭角也相应减小,当在最高液位时,扭角最小,一般为2°,即 作用在杠杆的力 F1=W-A(H-X)ρg 由于X是正比于H,所以其中X=kH,故上式可改写为 F1=W-AH(1-k)ρg 扭力矩:M1=F1l 由此可知,Δθ与液位H成比例关系,式中负号说明,液位变化越高,则扭角越小。 浮筒式液位计的转换器按其传输信号的不同,可分为两类:即气动式和电动式。 1.电动浮筒式液位计的转换器 图3-12b是霍尔变换装置的示意图。在扭力管的芯轴上固定一个推板3,当芯轴转角变化Δθ时,芯轴便带动推板3推动推杆4,并使支撑件5转动一个与液位计H相对应的角度,使霍尔片沿着固定弧线移动。由于芯轴在液位变化的全量程范围内输出的角位移量很小,因此可把霍尔片在磁场中的移动视为一直线位移Δx,即 Δx=k2Δθ 式中 K2--转换系数。 由于霍尔片所处的磁场是一个磁感应强度B与位移x成比例的线性磁场,其原理如图3-12c所示,因此霍尔片的输出电势VH与其位移Δx成线性关系。即 VH=K3Δx 式中 K3--转换系数 在仪表量程范围内,位移Δx约为1.5mm,输出电势VH约为10mV DC. 毫伏-毫安转换器将霍尔输出电势VH转换成4~20mA的标准电流信号,以便于其他控制仪表、显示仪表等配套使用。其转换原理如图3-13所示,图中放大器包括调制、交流放大、整流和功率放大等部分。霍尔变送器的输出电势与反馈电压UB比较后,将其差值调制成交流信号,并经交流放大、整流和功率放大后,输出一标准的4~20mA直流电流信号。 由图3-13可知,放大器的输出和输入的关系为: I0(RH+R1)=K4(VH-UB) I0=K4(VH-UB)/(RH+R1) 式中 K4--转换器的并环放大倍数。 其中的反馈电压 UB=I0R1(RW1+RW2)/(R2+RW1+RW2)=K5R0 式中 K5--反馈系数,(RW1+RW2)/(R2+RW1+RW2)=K5 电路图中的电位器RW1\RW2可用来修正介质的密度,改变仪表的量程和调节仪表的满度值。 2.气动浮筒式液位计的转换器 气动转换器与电动势的区别在于,扭力管芯轴转角Δθ的运动传给挡板以控制喷嘴,并输出气动标准信号,如图3-14所示。 气动仪表是自动化仪表中的一个重要类型,特别适用于防爆要求严格的炼油化工等工业部门。能源是压力稳定干净的压缩空气,其传输信号为20~100kPa.气动仪表的核心部分为喷嘴挡板机构,气动放大器,杠杆机构。喷嘴挡板机构将检测环节输出的微位移δ转换成喷嘴背压PB变化,经气动放大器将较小的PB变化放大为20~100kPa的p0输出,同时,p0通过负反馈波纹管作用到杠杆机构上,与检测信号在杠杆上达到力矩平衡,使仪表的输出p0与输入的被测变量一一对应。 3.智能浮筒式液位计 智能浮筒式液位(界面)变送器是电动浮筒液位计变送器的更新换代产品,如图3-15,塔是可通信的,以处理器为基础的液位、界面或密度检测仪表。除提供4~20mA的电流信号外,还叠加了符合通信协议的数字信号。可以很方便地使用手操器,获得来自过程、仪表或传感的信息,可查询、组态、标定或测试。利用通信协议,来自现场的信息可下载到控制系统中,按单个回路的信息接受。